三角函数总结
正弦,余弦,正切,余切
直角三角形中
正弦sin:对边/斜边,值在-1.0到1.0之间
余弦cos:邻边/斜边,值在-1.0到1.0之间

正切tan:sin/cos=对边/邻边
余切cot:cos/sin=邻边/对边


反正弦函数、反余弦函数
反正弦函数

反余弦函数
象限

运用:
例1:已知sinA=0.28,求角A的度数
角A=Math.asin(sinA) * 180 / Math.PI;
例2:已知直角三角形ABC,点A(0,0),点C(10,10),sinA=0.8,求点B的坐标
角度,弧度
角度转弧度: π/180×角度
弧度变角度 :180/π×弧度
60°=π / 3,90°=π / 2,180°=π,等号的左边是度数,右边是弧度。
圆上的点
求圆上点的坐标需要已知的条件:圆心、半径、角度
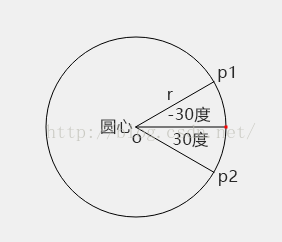
假设圆心:o (x0,y0)
半径:r
角度:angle (角度是相对于图中红点位置而言,逆时针为负数,顺时针为正)
计算公式
x=x0 + r * Math.cos(angle * Math.PI / 180) ; // (邻边/斜边)*半径=邻边,即x
y=y0 + r * Math.sin(angle* Math.PI / 180); // (对边/斜边)*半径=对边,即y
其中angle * Math.PI / 180为弧度,Math.cos(angle * Math.PI / 180) 即对比/斜边。最后*对边r,得出对边的高度,即x
三维空间坐标的旋转算法

坐标点(x,y,z)绕X,Y,Z轴的旋转角度θx,θy,θz。坐标点变为(x′,y′,z′)。
(1)绕X轴的旋转。变换关系为:
x′=x
y′=y*cosθx+z*sinθx
z′=y*sinθx+z*cosθx
(2)绕Y轴的旋转。变换关系为:
x′=x*cosθy+z*sinθy
y′=y
z′=-x*sinθy+z*cosθy
(3)绕Z轴的旋转。变换关系为:
x′=x*cosθz+y*sinθz
y′=x*sinθz+y*cosθz
z′=-z
(4)同时绕X,Y,Z轴旋转,其旋转角度为θx,θy,θz。变换关系为: